
Download Tektite-A’s OpenRocket file below, and optionally, a sample design for this year’s challenge:
The first step to creating a good rocket is simulation, and we recommend using OpenRocket to simulate the stability of your rocket and select the motor.
Motor Selection
⚠️ YOU MUST TARGET >900 FT IN OPENROCKET
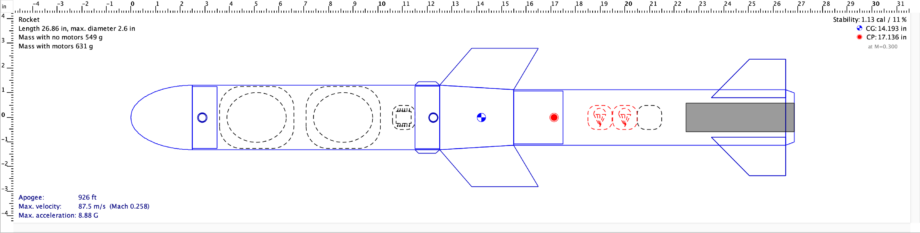
Tektite-A gets the right altitude by using the drag of the canards to reduce your apogee to the target altitude. So, your rocket must go higher than the altitude target for Tektite-A to succeed. I recommend going 100-150ft over your target, so for this years challenge, I would recommend 900-950ft as the apogee in the simulations.
Tips for Tektite-A Designs
- Use configurations to simulate multiple motors
- Use shorter burn motors to maximize velocity off the rail, but anything with an average thrust over 60N is too much. E.g. use the F52C, not the F67W.
- You can create stages to simulate the separation of the two parts at Apogee. See the sample design for this.
- Simulate flight time by increasing the thickness of the rear fins. For example, increase them until the apogee is 800ft and then look at the flight time to select your parachute.
Stability
Canards move the Center of Pressure forwards, which decreases stability. In addition, Tektite-A has quite a bit of mass at the center of gravity (144g), which could also reduce your stability if your center of gravity is higher than the transition. So, you may need bigger rear fins than you are used to when using Tektite-A. I usually target a stability of 1.0 when designing my rocket, although more is better than less.